Die can termination ist einer dieser Punkte, die in der Praxis erst dann auffallen, wenn der Bus schon unruhig wird: Telegramme fehlen, Fehlerzähler steigen, und auf dem Oszilloskop sieht man Reflexionen an den Flanken. Gemeint ist die Abschlussbeschaltung an den beiden Enden eines CAN-Busses, die dem Signal eine definierte Last gibt und Rückreflexionen dämpft. Gerade in Fahrzeugen, Maschinen und verteilten Infrastrukturen ist das keine Nebenfrage, sondern die Basis für eine stabile Kommunikation.
Die wichtigsten Punkte zur CAN-Terminierung auf einen Blick
- Bei High-Speed-CAN gehören zwei Abschlusswiderstände an die physikalischen Busenden, nicht an beliebige Knoten.
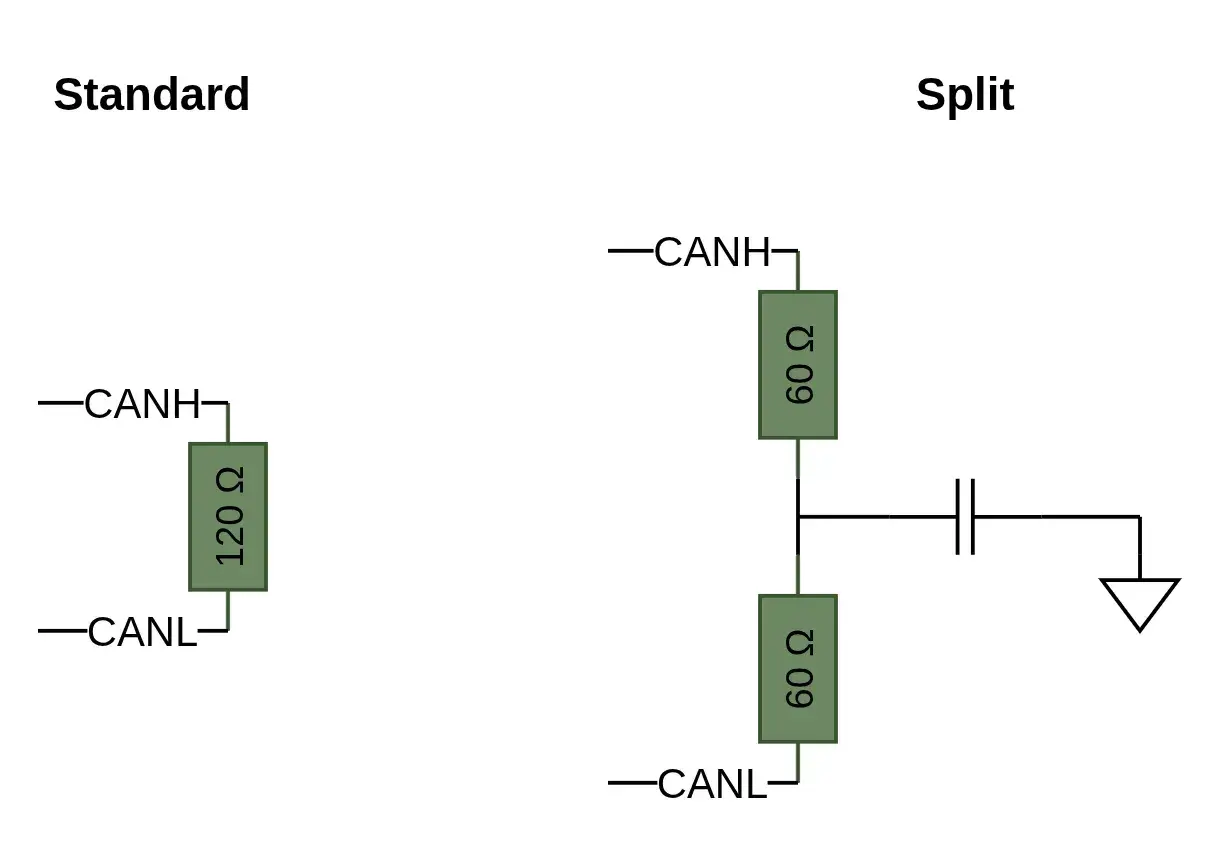
- Der Standardwert liegt meist bei 120 Ohm je Ende; zusammen ergibt das am ausgeschalteten Bus ungefähr 60 Ohm.
- Split-Termination nutzt zwei 60-Ohm-Widerstände und einen Kondensator am Mittelpunkt, um EMV und Störfestigkeit zu verbessern.
- Zu viele Terminierungen senken die Buslast zu stark und können das Signal genauso verschlechtern wie fehlende Widerstände.
- Eine einfache Ohm-Messung zwischen CANH und CANL ist oft der schnellste erste Check vor der Fehlersuche.
- Je höher die Datenrate und je länger die Leitung, desto wichtiger werden saubere Enden, kurze Stichleitungen und eine saubere Verkabelung.
Warum die Terminierung im CAN-Bus so viel ausmacht
CAN arbeitet auf einer Leitung mit definierter Wellenimpedanz, also dem elektrischen Kennwert, den schnelle Signale auf dem Kabel „sehen“. Wenn das Ende dieser Leitung offen ist oder die Abschlusslast nicht passt, wird ein Teil des Signals reflektiert. Diese Reflexion läuft zurück in den Bus, trifft auf die nächste Flanke und kann Bits verfälschen oder unnötiges Ringing erzeugen. Ich sehe das in der Praxis vor allem dann, wenn ein Netz zwar auf dem Tisch sauber funktioniert, im realen Kabelbaum aber plötzlich sporadische Fehler zeigt.
Der wichtige Punkt ist: Die Terminierung ist kein Komfort-Feature. Sie sorgt dafür, dass der Bus elektrisch so endet, wie er vom Transceiver erwartet wird. Ohne diese definierte Last wird nicht nur die Signalqualität schlechter, sondern auch die Fehlersuche deutlich zäher, weil der Fehler nicht im Controller, sondern in der physikalischen Schicht steckt. Genau deshalb sollte man zuerst die Leitungsebene prüfen und erst danach über Software, Filter oder den Austausch von Knoten nachdenken.
Damit ist klar, warum die Widerstände nicht irgendwo im System sitzen dürfen, sondern genau dort, wo die Leitung tatsächlich endet.
So baue ich die Busenden richtig auf
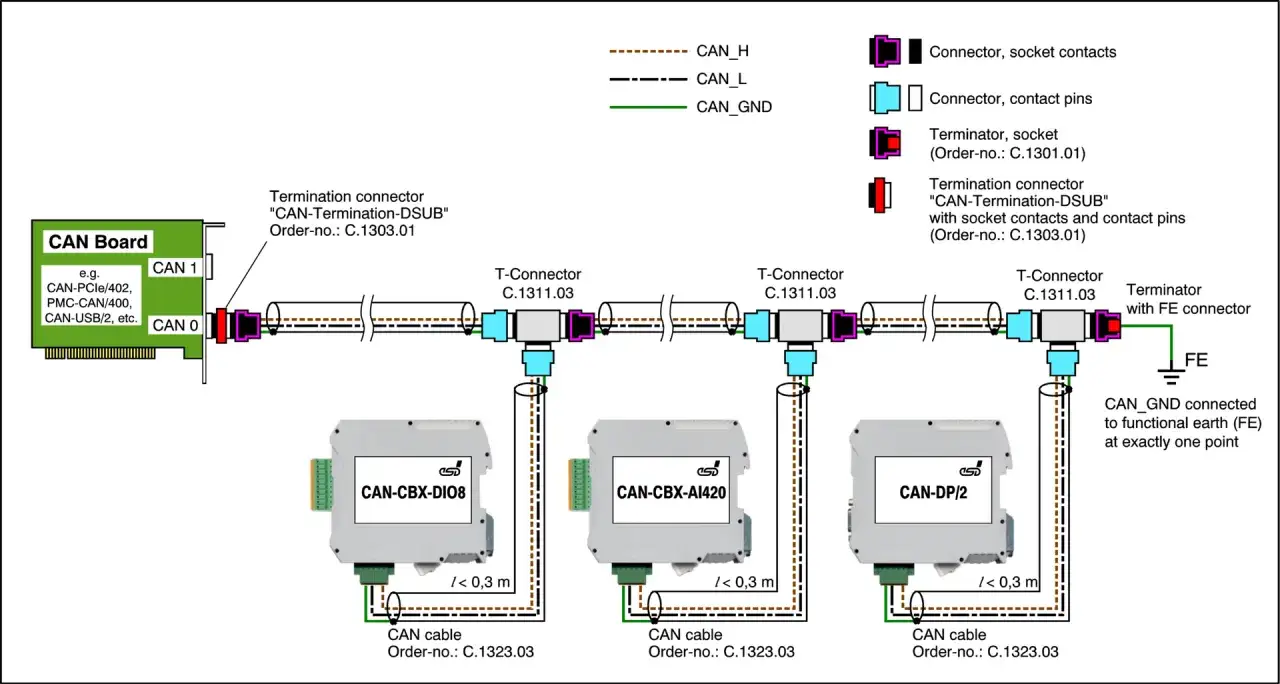
Die klassische CAN-Bus-Topologie ist linear: Ein Hauptbus läuft von einem Ende zum anderen, und die Teilnehmer hängen über möglichst kurze Stichleitungen, also kurze Abzweige vom Hauptbus, daran. An jedem elektrischen Ende sitzt ein Abschlusswiderstand. In der üblichen High-Speed-Auslegung sind das 120 Ohm pro Ende, sodass der Bus im Ruhezustand eine effektive Last von ungefähr 60 Ohm sieht.
Wichtig ist der Unterschied zwischen logischem und physikalischem Ende. Ein Knoten kann im Schaltplan der erste oder letzte sein, aber wenn die Leitung noch weiterläuft, ist er eben nicht das Busende. Genau da entstehen die typischen Fehler: Der Widerstand ist am Modul verbaut, aber nicht an der wirklichen Leitungsgrenze.
- Abschlusswiderstände gehören an die zwei äußersten Punkte der Leitung.
- Stichleitungen sollten kurz bleiben, weil sie sonst selbst zu kleinen Reflexionsquellen werden.
- Wenn ein Knoten schaltbare Terminierung bietet, darf sie nur an den echten Endpunkten aktiviert sein.
- Mehr als zwei Endabschlüsse sind fast immer ein Fehler, kein „Sicherheitsplus“.
Wer diese Grundregel sauber umsetzt, hat schon die halbe Stabilitätsarbeit erledigt. Als Nächstes lohnt sich der Blick auf die Frage, wann der einfache Abschluss genügt und wann Split-Termination die bessere Wahl ist.
Standardabschluss oder Split-Termination
Für viele Netzwerke reicht der klassische Abschluss mit je einem 120-Ohm-Widerstand pro Ende. In anspruchsvolleren Umgebungen setze ich jedoch oft auf Split-Termination, weil sie die EMV, also die elektromagnetische Verträglichkeit, verbessert und die gemeinsame Störspannung am Bus besser kontrolliert. Technisch bleibt die Grundidee gleich: Der Bus bekommt an beiden Enden eine definierte Last, nur die Art der Beschaltung ändert sich.
| Variante | Aufbau | Stärken | Grenzen | Typischer Einsatz |
|---|---|---|---|---|
| Standardabschluss | Je Ende ein 120-Ohm-Widerstand | Einfach, robust, leicht zu prüfen | Weniger gezielte EMV-Verbesserung | Viele klassische CAN-Netzwerke, Testaufbauten, weniger kritische Umgebungen |
| Split-Termination | Je Ende zwei 60-Ohm-Widerstände mit Mittelpunkt über Kondensator an Masse | Bessere Störunterdrückung, oft bessere Emission und Immunität | Etwas mehr Bauteile, saubere Masseführung nötig | Automotive, Industrie, EMV-kritische Installationen |
| Spezielle hochohmige Varianten | Netzwerkabhängige Sonderwerte, teils mit zusätzlicher Kapazität | Kann bestimmte Architekturen unterstützen | Nur nach Spezifikation sinnvoll, nicht als Pauschallösung | OEM-definierte Sondertopologien |
Der Split-Aufbau wirkt praktisch wie ein kleiner Tiefpass für Gleichtaktstörungen, also Störungen, die beide Leitungen ähnlich treffen. In Herstellerbeispielen tauchen dafür oft 4,7 nF als Kondensatorwert und die Aufteilung eines 120-Ohm-Abschlusses in zwei 60-Ohm-Widerstände auf. Einige spezielle Netzwerke arbeiten zusätzlich mit hochohmigen Nebenästen; solche Werte gehören aber in die jeweilige Netzspezifikation und nicht blind in jedes Design.
Meine Faustregel ist einfach: Wenn die Anlage unter EMV-Druck steht, nehme ich Split-Termination ernst. Wenn es nur um einen kleinen, kurzen Testbus geht, reicht der Standardabschluss oft völlig aus. Wer beides sauber voneinander abgrenzt, erkennt auch schneller, warum bestimmte Störungen überhaupt entstehen.
Die häufigsten Fehler, die ich bei CAN-Abschlüssen sehe
Die meisten Störungen sind nicht exotisch. Sie entstehen durch zu viele Widerstände, falsche Positionen oder durch einen Bus, der topologisch nie sauber linear aufgebaut war. Gerade bei Prototypen wird gern an jedem Modul ein Terminierungsplatz vorgesehen und später vergessen, dass davon am Ende nur zwei aktiv sein dürfen.
- Zu viele Terminierungen senken den effektiven Widerstand. Drei 120-Ohm-Widerstände ergeben zum Beispiel nur noch etwa 40 Ohm statt 60 Ohm am Bus.
- Falsche Position bedeutet: Widerstand sitzt auf der Platine, aber nicht am Leitungsende.
- Zu lange Stichleitungen verhalten sich wie kleine Nebenleitungen und verstärken Reflexionen.
- Sternförmige Verkabelung sieht auf dem Papier oft ordentlich aus, ist elektrisch aber meist die schlechtere Wahl.
- Unklare Schalter- oder Jumperstellung führt dazu, dass ein Messaufbau plötzlich anders reagiert als die Serienanlage.
Wenn ich einen Bus prüfe, frage ich deshalb zuerst nicht nach dem Controller, sondern nach dem Kabelverlauf. Das spart Zeit, weil die Ursache oft dort sitzt, wo man sie nicht sofort vermutet. Und genau an diesem Punkt hilft eine einfache Messung weiter.
Wie ich eine bestehende Anlage in wenigen Minuten prüfe
Die schnellste Erstprüfung ist eine Widerstandsmessung zwischen CANH und CANL bei ausgeschalteter Anlage. Zeigt das Multimeter ungefähr 60 Ohm, sind in der Regel beide 120-Ohm-Abschlüsse vorhanden. Liegt der Wert eher bei 120 Ohm, fehlt wahrscheinlich ein Abschluss. Ein deutlich niedriger Wert spricht meist für zu viele Terminierungen oder eine ungewollte Parallelschaltung.
| Messwert | Typische Bedeutung | Was ich danach prüfe |
|---|---|---|
| ca. 60 Ohm | Beide Enden terminieren den Bus | Stimmt die Position der Widerstände und ist die Topologie linear? |
| ca. 120 Ohm | Nur ein Abschluss aktiv | Fehlt am anderen Ende ein Widerstand oder ist ein Jumper offen? |
| deutlich unter 60 Ohm | Zu viele oder falsch verteilte Abschlüsse | Sind zusätzliche Terminierungen auf Zwischenknoten aktiv? |
| sehr hoch oder unendlich | Kein wirksamer Abschluss oder Unterbrechung | Ist der Bus offen, falsch verdrahtet oder ist ein Endpunkt nicht angeschlossen? |
Diese Messung ersetzt kein Oszilloskop, aber sie filtert die gröbsten Fehler sofort heraus. Wenn ich danach noch Reflexionen, Überschwingen oder unsaubere Flanken sehe, gehe ich als Nächstes an die Leitungslänge, die Stichleitungen und die Auswahl der Terminierungsart.
Was sich bei CAN FD und längeren Leitungen ändert
Das Grundprinzip bleibt bei CAN FD, also der Variante mit Flexible Data Rate, unverändert: Auch hier müssen die Busenden sauber abgeschlossen sein. Der Unterschied liegt in den engeren Zeitfenstern, denn höhere Datenraten machen Reflexionen schneller sichtbar. Was bei klassischem CAN noch knapp funktioniert, kann bei CAN FD schon zu viel sein, wenn Leitungslängen, Abzweige oder Masseführung nicht sauber passen.
Gerade deshalb wird die physikalische Schicht bei schnelleren Netzen wichtiger, nicht unwichtiger. Die Bitrate allein ist nicht das Problem, sondern die Kombination aus Geschwindigkeit, Kabellayout und Störumgebung. Für lange Leitungen, industrielle Hallen, Fahrzeuge mit vielen Steuergeräten oder andere raue Umgebungen lohnt sich eine konservative Auslegung mehr als ein optimistisches „Wird schon laufen“.
- Die Terminierung bleibt gleich wichtig, auch wenn sich das Protokoll weiterentwickelt.
- Je schneller die Flanken, desto weniger Spielraum bleibt für Reflexionen.
- Saubere Masse- und Schirmkonzepte zahlen auf die Terminierung ein, ersetzen sie aber nicht.
- Split-Termination ist oft die vernünftigere Wahl, wenn Störfestigkeit messbar mehr zählt als minimale Bauteilzahl.
Damit ist klar: Wer moderne CAN-Netze stabil betreiben will, muss physikalisch denken, nicht nur logisch. Der Abschluss ist dabei einer der kleinsten Bausteine, aber oft der mit dem größten Effekt auf die Robustheit.
Warum ein sauber terminierter CAN-Bus die teuersten Fehler vermeidet
In der Praxis spare ich mit einer sauberen Terminierung meist nicht an Bauteilen, sondern an Fehlersuche. Ein korrekt abgeschlossener Bus reduziert unklare Ausfälle, macht Messwerte reproduzierbar und verhindert, dass ein eigentlich kleines Verkabelungsproblem wie ein Controllerdefekt aussieht. Besonders in verteilten Netzwerken ist das Gold wert, weil jede unnötige Stunde Diagnose teurer wird als ein sauber gesetzter Widerstand.
Mein pragmatischer Ablauf ist immer derselbe: Busenden identifizieren, Anzahl der Abschlüsse zählen, den Ohm-Wert prüfen und erst danach auf Störungen, Transceiver oder Software schauen. Wer diese Reihenfolge beibehält, kommt schneller zu einer belastbaren Ursache und baut Netzwerke, die auch unter EMV-Last und in rauer Umgebung zuverlässig bleiben. Die beste CAN-Termination ist die, die man im Betrieb nicht mehr bemerkt, weil sie einfach konsequent richtig umgesetzt wurde.