Ein PWM-basiertes Analogsignal ist immer dann interessant, wenn ein Mikrocontroller mehr als nur schalten soll, aber kein vollwertiger DAC zur Verfügung steht. Ich zeige hier, wie aus einem Rechtecksignal eine brauchbare analoge Spannung wird, warum der Tiefpass die Qualität bestimmt und wo die Methode an ihre Grenzen stößt. Für Messknoten, Fernwirktechnik und sparsame Infrastrukturmodule ist das oft die pragmatischste Lösung.
Die wichtigsten Punkte auf einen Blick
- Der Mittelwert zählt: Bei PWM entsteht die analoge Spannung aus dem Tastverhältnis, nicht aus der Rechteckform selbst.
- Ohne Filter geht es nicht: Erst ein Tiefpass entfernt Trägerfrequenz und Oberwellen so weit, dass ein nutzbarer Analogausgang entsteht.
- Mehr PWM-Frequenz hilft, aber nicht kostenlos: Weniger Ripple bedeutet oft bessere Glättung, kann aber die Auflösung und Rechenreserve belasten.
- Filter und Last müssen zusammenpassen: Ein zu einfacher RC-Zweig ist für schwere Lasten oder längere Leitungen oft zu hochohmig.
- Für langsame Sollwerte ist PWM stark: Bias-Spannungen, Setpoints, Kalibrierwerte und einfache Steuergrößen lassen sich damit sehr effizient erzeugen.
- Für Präzision ist ein echter DAC meist sauberer: Bei breitbandigen oder stark rauschempfindlichen Signalen stoßt man mit PWM schnell an Grenzen.
Wie aus einem PWM-Signal eine analoge Spannung wird
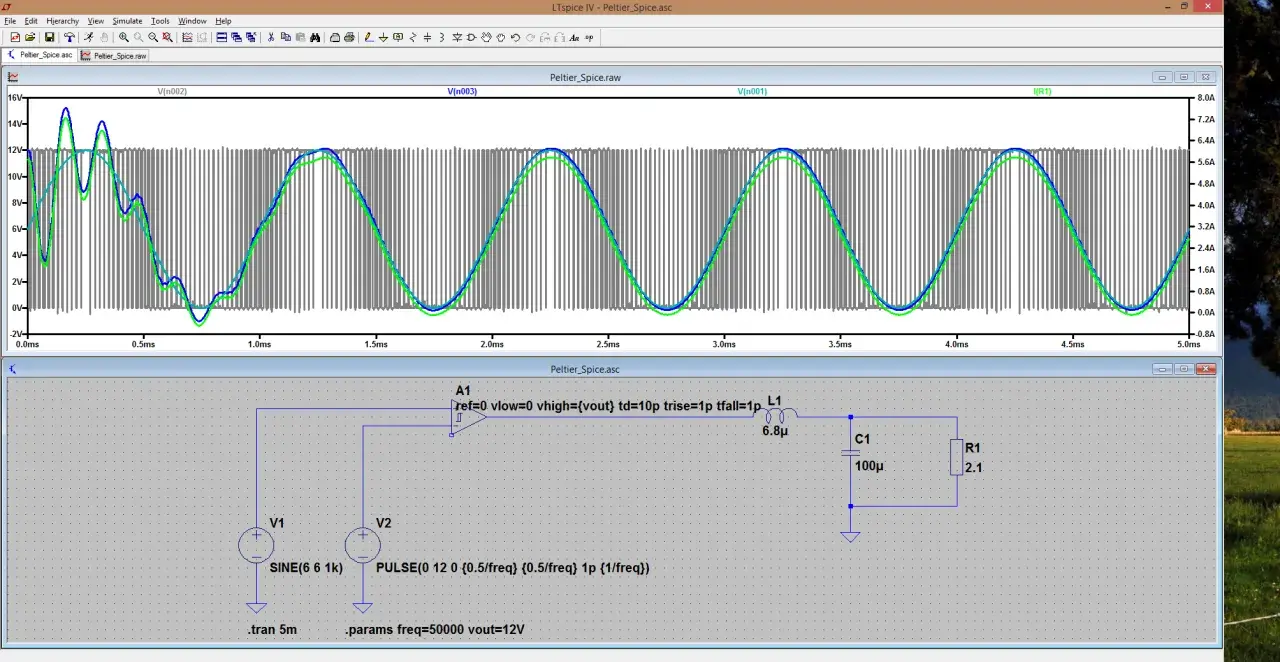
Ich denke bei dieser Technik immer in zwei Ebenen: In der Zeitdomäne sieht man nur ein schnelles Ein- und Ausschalten, in der Signalverarbeitung zählt aber der Mittelwert. Wenn das High-Level 5 Volt beträgt und das Tastverhältnis 50 Prozent ist, ergibt sich am Ausgang im Idealfall ein Mittelwert von 2,5 Volt. Genau deshalb funktioniert PWM als Ersatz für einen Digital-Analog-Wandler: Nicht die Pulsform selbst ist die „analoge“ Information, sondern ihr zeitlicher Anteil.
Sauber wird das erst, wenn man die Frequenzdomäne mitdenkt. Ein PWM-Signal enthält neben dem Nutzanteil starke Anteile bei der Trägerfrequenz und ihren Vielfachen. Diese Oberwellen sind kein Nebengeräusch im engen Sinn, sondern Teil des Signals - und sie müssen durch einen Tiefpass unterdrückt werden, damit am Ausgang wirklich eine glatte Spannung übrig bleibt. Ohne diese Glättung hätte man nur einen schnellen Schaltknoten, keinen Analogausgang.
Praktisch bedeutet das: Die gewünschte Ausgangsspannung folgt dem Tastverhältnis, die Rechteckanteile werden weggefiltert. Je ruhiger der Ausgang sein soll, desto konsequenter muss der Filter die hohen Frequenzen abschneiden. Genau an dieser Stelle trennt sich eine elegante Bastellösung von einem belastbaren Design.
Warum das Filter über Qualität und Nutzbarkeit entscheidet
Der Filter ist nicht Beiwerk, sondern der eigentliche Qualitätsfaktor. Ein einfacher RC-Tiefpass kann aus einer PWM ein brauchbares Analogsignal machen, aber er zwingt zu einem Kompromiss: Je stärker er glättet, desto langsamer reagiert der Ausgang. Wer das nicht mitdenkt, wundert sich später über Ripple, Verzögerung oder unruhige Sollwerte.
RC-Glied als Minimalvariante
Ein RC-Tiefpass ist die kleinste brauchbare Lösung, wenn Bauteilzahl, Kosten und Platz knapp sind. Für viele Mikrocontroller-Layouts reicht das, solange die Zielbandbreite deutlich unter der PWM-Frequenz liegt. Die Grenzfrequenz ergibt sich klassisch aus fc = 1 / (2πRC). Das ist keine Zauberformel, sondern schlicht die Stelle, an der der Filter anfängt, den Träger sichtbar zu dämpfen.
Als grobes Beispiel aus der Praxis: Für eine Zielbandbreite von 4 kHz sind RC-Kombinationen im Bereich von 4 kΩ und 0,01 µF oder 1,8 kΩ und 0,022 µF sinnvoll. Bei 10 kHz PWM bleibt am Träger noch relativ viel Restenergie stehen, bei 100 kHz ist die Dämpfung deutlich besser. Genau dort liegt der Kern der Sache: Ein höherer Träger erleichtert die Glättung, aber er verlangt mehr vom PWM-Takt und vom Timer-Design.
Aktiver Tiefpass für mehr Dämpfung
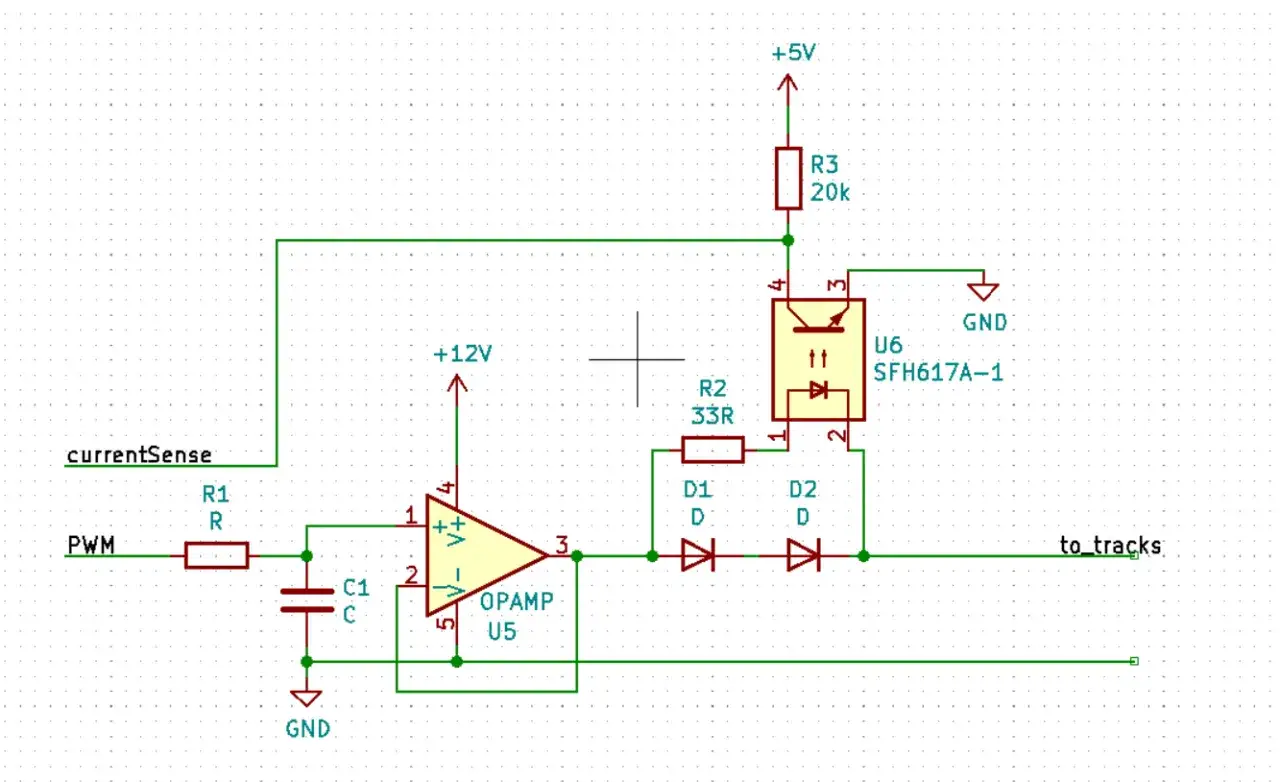
Wenn der Ausgang sehr ruhig sein soll oder die Last stärker variiert, ziehe ich einen aktiven Tiefpass oder einen Pufferverstärker vor. Ein Operationsverstärker entkoppelt den Filter vom Verbraucher und verhindert, dass die Last die Filtercharakteristik verschiebt. Das ist besonders wichtig, wenn das Signal nicht nur intern bleibt, sondern über längere Leitungen, Eingangsstufen oder Messpfade weitergegeben wird.
Für einfache Fernwirksysteme oder entfernte Knoten in einer Infrastrukturumgebung ist das oft der entscheidende Unterschied zwischen „funktioniert auf dem Tisch“ und „bleibt auch im Feld stabil“. Ein passives RC-Glied ist billig, aber seine Ausgangsimpedanz kann zu hoch sein, wenn nachgeschaltete Stufen oder Kabelkapazitäten mitspielen.
Lesen Sie auch: Anstiegszeit messen - Fehler vermeiden & Signale verstehen
Die praktische Daumenregel
Ich plane den Filter nie isoliert, sondern immer zusammen mit der geforderten Reaktionszeit. Wenn der Ausgang innerhalb von Millisekunden folgen muss, darf der Tiefpass nicht zu aggressiv sein. Wenn es nur um eine Sollspannung, einen Offset oder einen langsamen Steuereingang geht, darf er ruhig stärker glätten. Der beste Filter ist hier nicht der mathematisch schönste, sondern derjenige, der Ripple und Dynamik im richtigen Verhältnis hält.
Diese Abwägung führt direkt zur nächsten Frage: Wie viel Auflösung verliere ich eigentlich durch die PWM selbst, und wie stark beeinflusst die Taktfrequenz das Ergebnis?
Auflösung, Taktfrequenz und die eigentlichen Fehlerquellen
Die Qualität eines PWM-DAC hängt nicht nur vom Filter ab, sondern auch von der Zählauflösung des Timers. Ein konkretes Beispiel zeigt das gut: Bei 100 MHz Prozessortakt und 100 kHz PWM stehen pro Periode 1000 Zählstufen zur Verfügung. Das entspricht knapp 10 Bit Auflösung. Bei 3,3 Volt Versorgung ergibt das Schritte von etwa 3,3 mV. Manche Controller bieten zusätzlich eine hochauflösende PWM-Modi an, die noch etliche Bits feinere Abstufung liefern können.
Die zweite Stellschraube ist die PWM-Frequenz selbst. Senke ich sie auf 50 kHz, verdoppelt sich bei gleichem Takt die Schrittweite auf etwa 1,65 mV und die Auflösung steigt rechnerisch auf ungefähr 11 Bit. Gleichzeitig rückt aber die erste störende Oberwelle näher an die Nutzbandbreite heran, und der Tiefpass muss härter arbeiten. Mehr Auflösung und weniger Ripple ziehen also oft in entgegengesetzte Richtungen.
| Stellgröße | Was besser wird | Was schlechter werden kann |
|---|---|---|
| Höhere PWM-Frequenz | Weniger sichtbarer Ripple, leichtere Filterung | Weniger Zählstufen pro Periode, höhere Anforderungen an Timer und CPU |
| Niedrigere PWM-Frequenz | Feinere Duty-Cycle-Abstufung, einfachere Timer-Teilung | Mehr Durchschlag der Oberwellen, mehr Ripple am Ausgang |
| Stärkerer Tiefpass | Glattere Spannung, bessere Unterdrückung des Trägers | Langsamere Reaktion auf Sollwertänderungen |
| Schwächerer Tiefpass | Schnelleres Einschwingen | Mehr Restwelligkeit und höhere Störanfälligkeit |
Aus Signalverarbeitungssicht ist das keine Schwäche des Verfahrens, sondern seine eigentliche Natur. Man kauft sich Analogausgabe mit einer Kombination aus zeitlicher Mittelung und Filterung. Wer das sauber akzeptiert, trifft realistische Entscheidungen. Wer es ignoriert, erwartet von PWM die Präzision eines echten DAC und wird enttäuscht.
Wann ein PWM-DAC in Telekommunikations- und Messknoten sinnvoll ist
Gerade in dezentralen Systemen, in denen Energieverbrauch, Verfügbarkeit und Bauteilverfügbarkeit zählen, ist diese Methode erstaunlich stark. Ich setze sie überall dort an, wo ein Mikrocontroller nur einen langsamen analogen Sollwert erzeugen muss: Referenzspannungen für einfache Regelkreise, Bias-Spannungen, Kalibrier-Offsets, geringe Steuerspannungen oder lineare Vorgaben für nachgeschaltete Stufen. In solchen Szenarien ist ein kompletter externer DAC oft technisch überdimensioniert.
| Lösung | Vorteile | Grenzen | Typische Anwendung |
|---|---|---|---|
| PWM mit Tiefpass | Wenige Bauteile, günstig, gut in MCU-Hardware integrierbar | Ripple, begrenzte Bandbreite, lastabhängige Qualität | Setpoints, einfache Sollspannungen, langsame Steuerungen |
| R-2R-Leiter | Direkte D/A-Wandlung ohne PWM-Träger | Resistor-Matching kritisch, Layout empfindlich | Diskrete Experimente, einfache DAC-Aufbauten |
| Echter DAC | Sauberer Ausgang, bessere Linearität, oft höhere Präzision | Mehr Kosten, mehr Bauteilabhängigkeit, teils höhere Komplexität | Audio, Messreferenzen, rauschsensitive Systeme |
Für Funk- und Netzknoten, die in abgelegenen Regionen zuverlässig laufen müssen, ist dieser Kompromiss oft sinnvoller als ein teurer Präzisionswandler. Die Frage ist dann nicht, ob PWM „analog genug“ ist, sondern ob die Zielgröße langsam genug, robust genug und tolerant gegenüber Restwelligkeit ist. Genau dort spielt die Methode ihre Stärke aus.
Für Audio, hochpräzise Sensorik oder stark belastete Ausgänge würde ich sie dagegen nicht als erste Wahl nehmen. Dort ist die Reserve eines echten DACs oder eines sauber ausgelegten Analogpfads meist die bessere Investition.
Diese Einordnung führt direkt zur Praxis: Nicht das Prinzip entscheidet, sondern die Umsetzung auf dem Board.
So setze ich die Methode in der Praxis auf
- Zielbandbreite festlegen. Ich definiere zuerst, wie schnell der Ausgang wirklich reagieren muss. Ohne diese Zahl ist jeder Filter nur geraten.
- PWM-Frequenz gegen Auflösung abwägen. Ich wähle einen Träger, der deutlich oberhalb des Nutzsignals liegt, aber noch genügend Zählstufen pro Periode lässt.
- Den Tiefpass dimensionieren. Aus Grenzfrequenz und gewünschtem Ripple leite ich R und C ab. Für einen einfachen RC-Tiefpass ist das schnell gerechnet, aber nicht beliebig flexibel.
- Die Last prüfen. Wenn der Ausgang einen Eingang, ein Kabel oder eine wechselnde Last treiben muss, plane ich einen Pufferverstärker ein.
- Den realen Ausgang messen. Auf dem Oszilloskop prüfe ich Ripple, Einschwingzeit und Störspitzen, nicht nur den Mittelwert.
- Im Grenzfall nachfiltern. Wenn der Ausgang noch zu stark flattert, gehe ich eher zu einem aktiven Filter oder zu einer höheren PWM-Frequenz als zu „noch ein bisschen mehr Hoffnung“.
In dieser Reihenfolge vermeide ich den häufigsten Fehler: Man baut zuerst die Schaltung und merkt erst danach, dass Bandbreite, Auflösung und Last nicht zusammenpassen. Ein sauberer Aufbau beginnt mit den Anforderungen, nicht mit dem ersten freien Timer.
Woran ich vor dem Layout die Entscheidung festmache
Vor einem Layout oder einer Serienumsetzung prüfe ich drei Dinge besonders streng: Wie viel Restwelligkeit ist wirklich tolerierbar? Wie schnell muss der Ausgang auf neue Werte springen? Und wie stabil bleibt das Ergebnis, wenn Versorgung, Temperatur oder Last leicht schwanken? Wenn diese drei Antworten klar sind, ist die Entscheidung meist einfach.
Bleibt nur ein langsamer Sollwert mit geringer Last übrig, ist PWM als D/A-Ersatz oft genau richtig. Muss das Signal aber sauber, breitbandig oder stark belastbar sein, würde ich keinen Umweg gehen. Dann ist ein echter DAC, oder zumindest eine deutlich aufwendigere analoge Ausgangsstufe, die bessere Wahl. Für den Rest gilt: Ein gut ausgelegter PWM-Ausgang ist kein Notbehelf, sondern eine robuste Engineering-Lösung, solange man seine Grenzen ehrlich mitplant.