Eine Oszillatorschaltung (oscillator circuit) liefert das periodische Signal, ohne das Taktgeneratoren, Funkmodule, Echtzeituhren und viele Steuerungen nicht sauber arbeiten. Für Telekommunikations- und Infrastruktursysteme ist das mehr als ein Detail auf dem Schaltplan: Hier entscheiden Frequenztreue, Startverhalten, Störfestigkeit und Layout oft über die Zuverlässigkeit des ganzen Geräts. Ich zeige, wie die Schaltung schwingt, welche Bauarten sich unterscheiden und worauf ich bei Auswahl und Praxis immer achte.
Die wichtigsten Punkte auf einen Blick
- Ein Oszillator erzeugt sein Signal über Rückkopplung; ohne passendes Verhältnis aus Verstärkung und Phase läuft er nicht stabil an.
- Für hohe Genauigkeit und geringe Drift ist der Quarz meist die erste Wahl, vor allem bei Takt- und Zeitbasen.
- RC- und Relaxationsoszillatoren sind einfacher und oft günstiger, liefern aber selten die beste Langzeitstabilität.
- LC-Schaltungen spielen ihre Stärke eher im Hochfrequenzbereich aus, etwa in Funk- und RF-Stufen.
- Bei Problemen sind Lastkapazität, parasitäre Effekte, Versorgung und Layout oft entscheidender als das reine Grundprinzip.
Was eine Oszillatorschaltung in Netzen und Geräten wirklich leistet
Im Kern erzeugt die Schaltung ein periodisches Signal aus sich selbst heraus. Genau das braucht man überall dort, wo Zeit, Takt oder Trägerfrequenz sauber definiert sein müssen: in Routern, Funkgeräten, Messmodulen, Echtzeituhren, Modems und vielen Steuerungen in der Netz- und Infrastrukturtechnik.
Ich sehe den praktischen Wert besonders dort, wo Wartung teuer oder selten ist. In abgelegenen Installationen zählt nicht nur, ob ein Takt vorhanden ist, sondern ob er auch nach Spannungsunterbrechungen, Temperaturwechseln und langer Laufzeit verlässlich bleibt. Ein instabiler Takt wirkt dort schnell wie ein kleiner Fehler, der sich im ganzen System fortpflanzt.
Damit ist auch klar, warum man Oszillatoren nicht nur als Bauteil, sondern als Referenz für das gesamte Systemverhalten betrachten muss. Genau an dieser Stelle wird das Zusammenspiel aus Schaltungstopologie, Bauteilen und Umfeld entscheidend, und das führt direkt zur Frage, wie das Schwingen überhaupt entsteht.
Wie die Schaltung schwingt und warum sie nicht einfach nur verstärkt
Ich denke bei solchen Schaltungen immer in drei Fragen: Kommt genug Signal zurück? Ist die Phase passend? Regelt sich die Amplitude wieder ein? Erst wenn alle drei Punkte zusammenpassen, entsteht eine stabile Schwingung statt eines kurzen Ausschlags oder einer unkontrollierten Verzerrung.
- Rückkopplung bringt einen Teil des Ausgangssignals wieder an den Eingang zurück.
- Phasenlage sorgt dafür, dass sich das rückgeführte Signal zum richtigen Zeitpunkt addiert und nicht aufhebt.
- Verstärkung muss so gewählt sein, dass die Schwingung startet und danach nicht in die Sättigung läuft.
Im linearen Modell spricht man vom Barkhausen-Kriterium: Die Schleifenverstärkung liegt im Idealfall bei 1, und die Phasenbedingung ist erfüllt. In echten Schaltungen reicht das allein aber nicht, weil Bauteiltoleranzen, Temperatur und Versorgungsschwankungen den Arbeitspunkt verschieben. Darum braucht man oft eine Amplitudenbegrenzung oder eine automatische Verstärkungsregelung, sonst wird aus einem sauberen Sinus schnell eine gequetschte Kurve mit deutlicher Verzerrung.
Genau aus diesem Grund ist ein Oszillator nie nur „ein Verstärker mit Feedback“. Er ist immer ein bewusst abgestimmtes System aus Anlaufreserve, Phasenverhalten und Stabilisierung. Mit diesem Blick lässt sich der Unterschied zwischen den wichtigsten Bauarten deutlich besser einordnen.
Die wichtigsten Bauarten im Vergleich
Für die Auswahl zählt weniger der Name der Topologie als die Frage, welches Signal man braucht und wie hart die Randbedingungen sind. In der Praxis bleiben vier Gruppen besonders relevant: RC-, LC-, Quarz- und Relaxationsoszillatoren.
| Typ | Typisches Signal | Stärken | Grenzen | Typische Anwendungen |
|---|---|---|---|---|
| RC-Oszillator | Sinus oder Rechteck, je nach Topologie | Wenig Bauteile, günstig, gut für tiefe Frequenzen | Drift durch Temperatur und Toleranzen, bei hohen Frequenzen schwieriger | Einfache Takte, Audio-Nahbereich, Hilfsoszillatoren |
| LC-Oszillator | Meist Sinus | Gut für Hochfrequenz, selektiv, elegant für Resonanzkreise | Spulen sind groß, empfindlich und parasitäre Effekte werden schnell sichtbar | Funk- und RF-Stufen, lokale Schwingkreise, Sender- und Empfängertechnik |
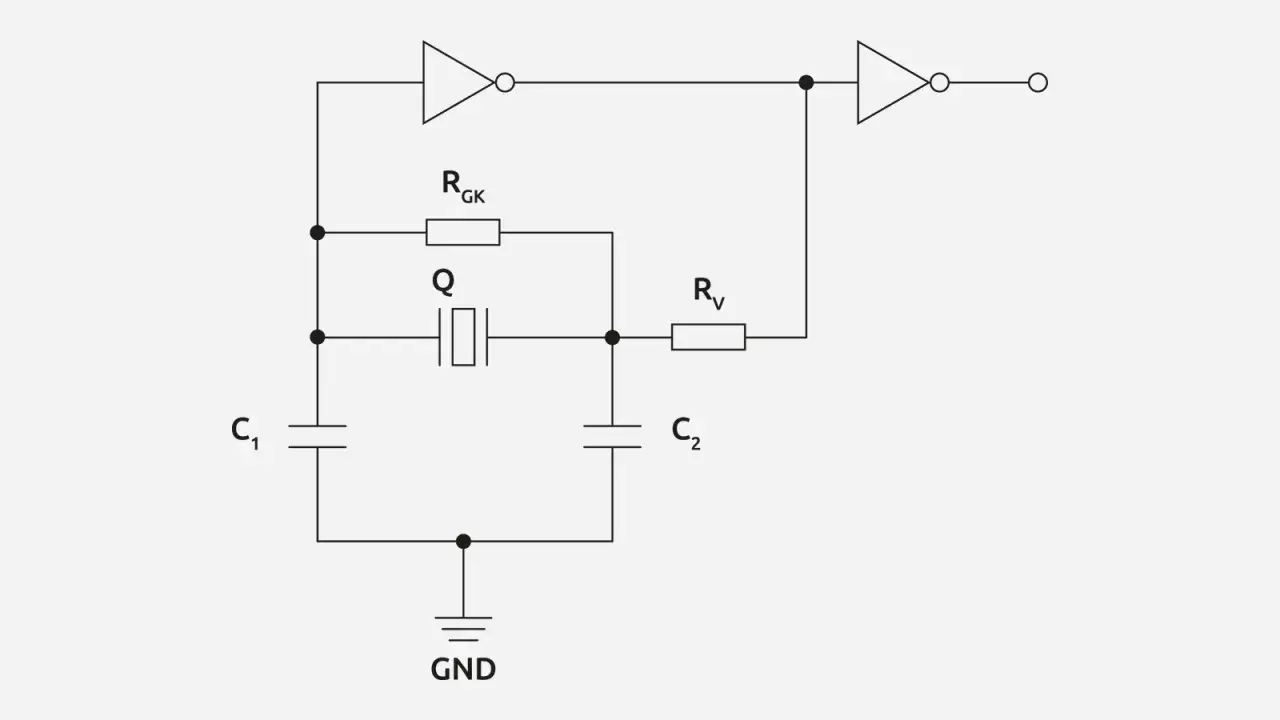
| Quarz-Oszillator | Sehr stabiler Takt, oft sinusnah oder digital weiterverarbeitet | Hohe Frequenzstabilität, geringer Drift, für 32,768 kHz bis in hohe MHz-Bereiche geeignet | Lastkapazität und Layout müssen passen, Startverhalten ist nicht immer sofort perfekt | RTC, Mikrocontroller-Takt, Kommunikationsgeräte, präzise Zeitbasen |
| Relaxationsoszillator | Rechteck, Rampe, Dreieck oder Impulse | Einfach, robust, oft billig | Weniger sinusrein, Genauigkeit meist mittel bis niedrig | Timer, Blinkgeber, Reset- und Steuerschaltungen, einfache Taktquellen |
Meine Kurzregel ist simpel: Wenn ein System Daten sauber takten soll, greife ich zuerst zum Quarz. Wenn ich eine HF-Frequenz aufbauen oder selektiv machen will, schaue ich mir LC an. Wenn es nur um einen einfachen, brauchbaren Takt geht, reichen RC oder eine Relaxationsschaltung oft völlig aus.
Ein Detail, das Anfänger gern unterschätzen: Die bessere Bauart ist nicht automatisch die komplexere. Für viele Infrastrukturgeräte zählt nicht der theoretisch schönste Sinus, sondern die Kombination aus ausreichender Genauigkeit, stabilem Anlauf und vertretbarem Aufwand. Genau deshalb lohnt sich der Blick auf die konkrete Anwendung.
So wähle ich die passende Schaltung für Telekommunikation und Infrastruktur
In der Praxis entscheide ich nicht nach Eleganz, sondern nach Aufgabe. Ein Takt für ein Routermodul, eine Funkstrecke oder eine Zeitbasis in einem Überwachungssystem braucht andere Eigenschaften als ein einfacher Timer in einer Hilfsschaltung. Wer das vermischt, kauft entweder zu teuer ein oder spart an der falschen Stelle.
- Hohe Zeitgenauigkeit spricht fast immer für den Quarz, vor allem bei RTCs, Protokolltimern und synchronen Systemen.
- Frequenz im HF-Bereich führt oft zu LC-Topologien, wenn ein Resonanzkreis direkt Teil der Funktion ist.
- Einfachheit und niedrige Kosten reichen häufig für RC- oder Relaxationsoszillatoren, wenn Toleranzen akzeptabel sind.
- Stark schwankende Versorgung verlangt mehr Reserve beim Anlauf und eine sauberere Stabilisierung der Amplitude.
- Wenig Wartung vor Ort macht eine stabile, gut spezifizierte Zeitbasis besonders wichtig, weil Korrekturen später teuer werden.
Gerade in Installationen mit begrenztem Wartungsfenster würde ich die Robustheit des Starts und die Temperaturdrift höher gewichten als den letzten Prozentpunkt an Stückkosten. Das gilt besonders für vernetzte Geräte, Remote-Knoten und Kommunikationssysteme, die nicht ständig neu abgeglichen werden können.
Wenn die Entscheidung noch offen ist, hilft meist eine einfache Frage: Muss die Schaltung nur schwingen, oder muss sie sich auch über Monate oder Jahre verlässlich an dieselbe Frequenz halten? Die Antwort trennt die billige Lösung von der richtigen Lösung sehr schnell.
Die häufigsten Fehler beim Aufbau und Abgleich
Ich sehe in der Praxis immer wieder dieselben Fehler. Die Schaltung ist auf dem Papier richtig, startet aber nur sporadisch, driftet zu stark oder produziert ein Signal, das unter Last anders aussieht als im Labor. Meist liegt das Problem nicht an einem einzelnen „schlechten Bauteil“, sondern an einer ungünstigen Summe kleiner Abweichungen.
| Symptom | Wahrscheinliche Ursache | Was ich zuerst prüfe |
|---|---|---|
| Schwingung startet nur auf manchen Platinen | Zu wenig Anlaufreserve, Bauteiltoleranzen, falsche Rückkopplung | Verstärkung bei Worst-Case-Bedingungen, Last, Toleranzkette |
| Frequenz liegt neben dem Sollwert | Falsche Lastkapazität oder falscher Resonanzpunkt | Quarz-Spezifikation, Kapazitäten, parasitäre Effekte der Leiterbahnen |
| Sinus wird sichtbar verzerrt oder wirkt abgeflacht | Verstärkung zu hoch, Amplitudenbegrenzung greift zu spät | Gain, Regelung, Sättigung des aktiven Elements |
| Frequenz ändert sich beim Berühren oder Erwärmen der Platine | Empfindliches Layout, zu lange Leitungen, thermische Kopplung | Leiterbahnlängen, Abschirmung, thermische Umgebung |
| Signal bricht nach dem Einschalten kurz weg | Startreserve zu klein oder Versorgungseinbruch | Power-On-Verhalten, Entkopplung, Einschaltsequenz |
Der häufigste Denkfehler ist für mich immer noch die Annahme, dass die Schaltung „eigentlich“ funktionieren müsste, sobald die Grundformel stimmt. In Wahrheit entscheidet oft das Zusammenspiel aus Last, Temperatur, Versorgung und Leiterplattenlayout. Genau dort entstehen die Probleme, die im Labor erst spät sichtbar werden.
Wer diese Fehler systematisch prüft, spart meist mehr Zeit als mit jedem Austausch einzelner Bauteile. Damit landet man automatisch bei den Details, die am Ende über Verlässlichkeit entscheiden.
Worauf ich bei Timing, Startverhalten und Layout am Ende achte
Wenn ich eine Schaltung final bewerte, schaue ich nicht nur auf die Nennfrequenz. Mich interessieren Startreserve, Drift, Belastbarkeit und die Frage, ob das Signal auch nach Spannungswechseln und Umgebungsstress stabil bleibt. Erst dann ist die Lösung für den realen Einsatz reif.
- Startreserve: Die Schaltung muss auch bei Bauteilstreuung, kalter Versorgung und ungünstiger Temperatur sicher anlaufen.
- Lastkapazität: Bei Quarzen ist sie kein Nebendetail, sondern Teil der Frequenzdefinition.
- Leiterbahnen: Kurz, symmetrisch und mit sauberem Rückweg geführt, damit parasitäre Effekte klein bleiben.
- Entkopplung: Die Versorgung des aktiven Elements braucht eine saubere lokale Pufferung.
- Umgebung: Temperatur, Feuchte und EMV beeinflussen die Stabilität oft stärker als erwartet.
Wenn ich eine Oszillatorschaltung in ein Kommunikations- oder Infrastrukturprojekt übernehme, teste ich sie deshalb unter realen Randbedingungen und nicht nur auf dem Tisch mit Idealwerten. Genau dort zeigt sich, ob der Entwurf nur funktioniert oder wirklich robust ist.