
In der Elektronik entscheidet die clock frequency darüber, wie viele Taktzyklen ein Prozessor oder Schaltkreis pro Sekunde verarbeiten kann. Für die Praxis ist aber wichtiger, was dieser Takt tatsächlich antreibt: Rechenkerne, Busse, Wandler, Speicher und Synchronisation. Genau deshalb lohnt sich ein nüchterner Blick auf den Begriff, seine Grenzen und darauf, wie man ihn sinnvoll bewertet.
Die wichtigsten Punkte auf einen Blick
- Die Taktfrequenz beschreibt Zyklen pro Sekunde, nicht automatisch die reale Arbeitsleistung.
- Mehr MHz oder GHz bringen nur dann etwas, wenn Architektur, Speicher und Peripherie mithalten.
- Busse und Schnittstellen haben harte Grenzen, etwa 400 kHz im I2C-Fast-Mode und 1 MHz im Fast-Mode-Plus.
- Bei Wandlern und Funktechnik sind Jitter und Referenztakt oft wichtiger als die reine Frequenzzahl.
- Für die Auswahl zählen Datenrate, Latenz, Stromaufnahme, Temperaturreserve und Taktqualität zusammen.
Was die Taktfrequenz in der Elektronik wirklich bedeutet
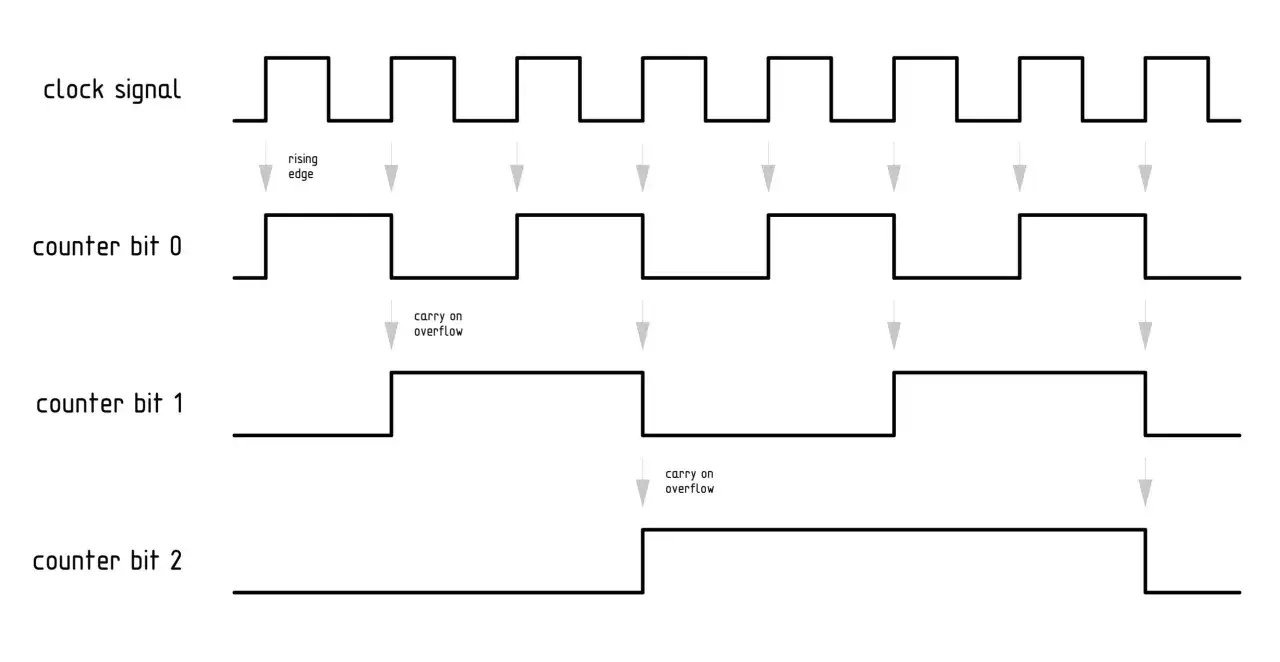
Eine Taktfrequenz beschreibt die Zahl der Taktzyklen pro Sekunde. Der Oszillator liefert die Referenz, eine PLL kann sie vervielfachen oder teilen, und erst daraus entsteht die Systemtaktung. In CPU-Datenblättern steht der Wert oft in MHz oder GHz, bei einfacheren Bussen auch in kHz.
Wichtig ist die Trennung zwischen Impulsrate und Arbeitsmenge: Ein Zyklus ist nur ein Zeitschritt. Ob in diesem Schritt eine Instruktion abgeschlossen wird, hängt von der Architektur ab. Darum können zwei Bausteine mit derselben Frequenz sehr unterschiedlich schnell sein.
Ich trenne deshalb in der Praxis immer zwei Ebenen: die Zahl auf dem Datenblatt und die tatsächlich nutzbare Leistung. Sobald das klar ist, wird auch verständlicher, warum ein höherer Wert nicht automatisch das bessere System ergibt. Genau dort setzt die nächste Frage an: Wann hilft mehr Takt, und wann wird er nur teurer?
Warum ein höherer Takt nicht automatisch mehr Leistung bringt
Die verbreitetste Fehlannahme ist simpel: mehr Takt gleich mehr Leistung. Das stimmt nur begrenzt. Moderne Kerne können mehrere Instruktionen pro Takt bearbeiten, Speicherzugriffe kosten oft mehr Zeit als die Rechenarbeit selbst, und thermische Limits führen unter Last schnell zu Taktabsenkungen.
- IPC beschreibt, wie viel ein Kern pro Takt erledigt. Mehr Takt mit schwacher IPC bringt weniger als ein effizienterer Kern mit etwas geringerem Takt.
- Cache und RAM entscheiden mit, ob der Kern Arbeit bekommt oder auf Daten warten muss.
- Power und Temperatur setzen in realen Geräten oft die obere Grenze. Ein theoretischer Boost-Wert bleibt dann nur kurz erreichbar.
Ich bewerte Frequenz deshalb nie isoliert, sondern immer im Kontext von Architektur, Lastprofil und Energiebedarf. Das führt direkt zu den Stellen, an denen Taktgrenzen in der Elektronik tatsächlich hart werden.
Wo die Frequenzgrenze in der Praxis sitzt
In echten Schaltungen bestimmt die Frequenz selten allein das Ergebnis. Meist entscheidet das Zusammenspiel aus Leitungen, Laufzeiten, Signalform und Protokoll darüber, ob ein System stabil bleibt. Genau deshalb ist es sinnvoll, typische Einsatzfelder nicht nur nach Zahlen, sondern nach ihren Randbedingungen zu betrachten.
| Anwendungsfall | Typische Taktordnung | Was die Grenze setzt | Praxisfolge |
|---|---|---|---|
| Prozessoren und SoCs | Von MHz bis GHz | Architektur, Cache, Spannung, Temperatur | Höherer Takt hilft nur, wenn der Rest des Systems mithält. |
| I2C-Busse | 400 kHz im Fast Mode, 1 MHz im Fast Mode Plus | Pull-ups, Leitungskapazität, Repeater-Verzögerung | Zu viel Takt erzeugt Kommunikationsfehler oder NACKs. |
| Displays und Pixel-Takt | Je nach Auflösung deutlich über 100 MHz | Auflösung, Farbtiefe, Datenkanäle | Zu wenig Pixel-Takt begrenzt Bildrate oder Auflösung. |
| ADC- und DAC-Abtastung | Bausteinabhängig bis in hohe MHz-Bereiche und darüber | Jitter und Aperturunsicherheit | Die Messgenauigkeit sinkt, wenn der Takt nicht stabil genug ist. |
Ein gutes Beispiel ist der I2C-Bus: Texas Instruments nennt für Fast Mode 400 kHz und für Fast Mode Plus 1 MHz als maximale Taktfrequenzen. In solchen Fällen nützt es wenig, nur den Takt hochzuschieben. Man muss Leitungslängen, Pull-ups, Repeater und die gesamte Timing-Reserve mitdenken. Sobald die Frequenz an diese Grenzen stößt, wird die Signalqualität wichtiger als die Sollzahl.
Das gleiche Muster sieht man in Displays und Wandlern: Der Nominalwert auf dem Papier ist nur dann hilfreich, wenn das Signal ihn sauber trägt. Genau an dieser Stelle kommen Jitter und PLLs ins Spiel.
Warum Jitter und PLLs den Unterschied machen
Jitter ist die zeitliche Schwankung einer Flanke. Für viele digitale Schaltungen ist das zunächst nur ein Detail, bei schnellen Wandlern und synchronen Links wird es aber zum echten Fehlerfaktor. Wenn ein ADC nicht exakt im geplanten Moment abtastet, verschiebt sich der gemessene Wert. Bei einem schnellen seriellen Link oder im Funkpfad kann ein unruhiger Referenztakt die Fehlertoleranz verkleinern.
Eine PLL, also eine Phase-Locked Loop, koppelt Ausgangsfrequenz und Phase an eine Referenz. In der Praxis nutze ich PLLs nicht nur zum Hoch- oder Herunterteilen, sondern auch zur Taktaufbereitung: saubere Verteilung, definierte Phasenlage und oft bessere Entkopplung von Störungen. Quartzbasierte Oszillatoren bleiben deshalb wichtig, weil sie eine stabile Basis liefern.
Der Punkt ist einfach: Die reine Frequenz sagt noch nichts über die Nutzbarkeit des Takts aus. Erst Stabilität, Rauschen und Verzögerungen entscheiden, ob ein System zuverlässig arbeitet. Damit landet man automatisch bei der Frage, wie man den richtigen Takt für ein konkretes System auswählt.
Wie ich die passende Frequenz für ein System auswähle
Ich gehe bei der Auslegung immer systemisch vor. Ein sauber gewählter Takt kostet weniger Zeit als späteres Debugging, und genau das zählt in embedded Systemen, Netzwerkknoten und Messaufbauten.
- Arbeitsziel definieren. Welche Datenrate, Latenz oder Abtastrate muss erreicht werden?
- Flaschenhälse prüfen. Speicher, Bus, Peripherie und Software dürfen nicht langsamer sein als der Kern.
- Timing-Marge berechnen. Temperaturextreme, Versorgungsschwankungen und Layoutfehler brauchen Reserve.
- Jitter-Budget festlegen. Besonders bei ADCs, DACs und Funkmodulen entscheidet das oft über Erfolg oder Fehlfunktion.
- Erst dann den Takt wählen. Häufig ist ein etwas niedrigerer, sauberer Takt besser als ein aggressiver Wert am Limit.
Ein Mikrocontroller, der Sensoren liest und Daten über ein Netzwerk versendet, braucht oft kein Rekordniveau bei MHz oder GHz. Er braucht ein Timing, das auch unter Last, bei Temperaturwechseln und mit realen Leitungen stabil bleibt. Gerade in solchen Systemen ist die Differenz zwischen theoretischer und praktischer Taktfrequenz besonders groß.
Aus genau diesem Grund verschiebt sich der Fokus moderner Entwürfe weg von reiner MHz-Jagd hin zu Timing-Disziplin und Energieeffizienz. Das ist nicht spektakulär, aber im Alltag fast immer die bessere Ingenieursentscheidung.
Warum saubere Taktnetze 2026 wichtiger sind als reine Megahertz
2026 sehe ich in vielen Projekten denselben Trend: Nicht der höchste Maximalwert gewinnt, sondern das System mit der besten Taktdisziplin. In Routern, Funkmodulen, Messgeräten und Edge-Controllern sind synchronisierte, belastbare Taktnetze oft wichtiger als eine beeindruckende Zahl im Datenblatt.
- Reserve ist besser als Grenzbetrieb.
- Geringer Jitter ist bei Mess- und Funkanwendungen oft wertvoller als ein paar zusätzliche MHz.
- Power-Management mit dynamischer Taktung spart Energie, ohne die Architektur zu überfordern.
- Wer Frequenz, Layout und Versorgung gemeinsam denkt, spart spätere Fehlerkorrekturen.
Wenn ich ein Design bewerte, frage ich deshalb nicht zuerst nach dem höchsten Takt, sondern danach, ob der gewählte Takt unter Last, Temperatur und realen Leitungsbedingungen stabil bleibt. Genau dort trennt sich gute Elektronik von einer Zahl, die nur auf dem Papier überzeugt.