Die wichtigsten Punkte auf einen Blick
- Ein MEMS-Gyroskop misst die Winkelgeschwindigkeit, nicht direkt die absolute Lage.
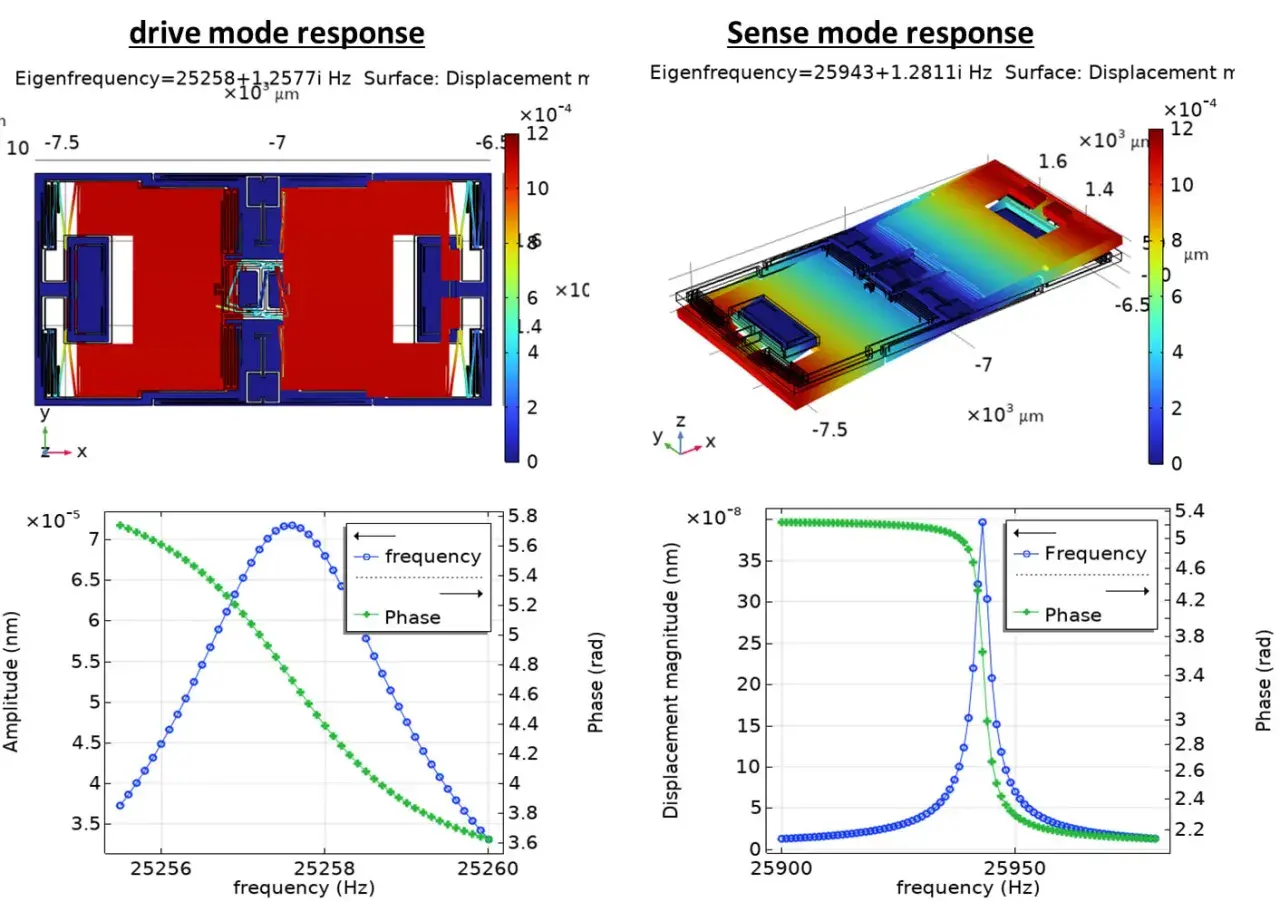
- Das Messprinzip beruht auf einer schwingenden Mikrostruktur und der Coriolis-Kraft.
- Für die Praxis zählen Messbereich, Bias, Rauschdichte, Bandbreite und Temperaturverhalten mehr als ein einzelner Spitzenwert.
- Gyroskop, Beschleunigungssensor und IMU lösen unterschiedliche Aufgaben und werden oft gemeinsam genutzt.
- Die größten Probleme entstehen meist bei Kalibrierung, Montage und Filterung, nicht im Sensor selbst.
Was ein MEMS-Gyroskop tatsächlich misst
Ich trenne in Projekten immer zuerst zwischen Drehrate und Winkel: Das Gyroskop liefert die momentane Drehgeschwindigkeit um eine oder mehrere Achsen, die Orientierung ergibt sich erst durch Integration und durch zusätzliche Referenzsensoren. Genau deshalb ist ein guter Gyro allein noch keine vollständige Lagebestimmung, sondern ein Baustein für ein größeres Messsystem. Wer das sauber versteht, vermeidet viele Fehlannahmen bei Reglern, Navigationslogik und Stabilisierung.
In der Praxis heißt das: Für schnelle Regelkreise ist die Drehrate der eigentliche Nutzwert, während die absolute Richtung oft erst aus einem Verbund mit Beschleunigungssensor und Magnetometer entsteht. Wie das im Inneren passiert, sieht man erst beim Messprinzip.
Wie das Messprinzip mit der Coriolis-Kraft funktioniert
Ein MEMS-Gyroskop nutzt eine winzige schwingende Struktur aus Silizium. Dreht sich das Gehäuse, wirkt auf diese Masse eine Coriolis-Kraft, die die Schwingung minimal seitlich ablenkt. Diese Ablenkung wird meist kapazitiv erfasst, also über kleine Änderungen an Kondensatoren auf dem Chip.
Der entscheidende Punkt ist die Größenordnung: Das Signal ist extrem klein, deshalb sind mechanisches Design, Ausleseschaltung und Temperaturstabilität genauso wichtig wie die eigentliche Sensorzelle. Moderne Bausteine integrieren deshalb nicht nur die MEMS-Struktur, sondern auch Verstärker, Filter und digitale Auswertung auf demselben Chip oder im selben Gehäuse. Genau an dieser Stelle trennt sich ein brauchbarer Sensor von einem, der in der Demo gut aussieht, im realen Gerät aber bei Vibrationen oder Temperaturwechseln wegdriftet.
Bevor man also über Auswahlkriterien spricht, muss man verstehen, warum das Ausgangssignal überhaupt so empfindlich auf Störungen reagiert.
Welche Datenblattwerte ich zuerst prüfe
Ein Hersteller wie STMicroelectronics nennt für 3-Achsen-Gyroskope einen Messbereich von etwa ±30 bis ±4000 °/s. Das zeigt gut, wie breit die Spanne zwischen empfindlichen Consumer-Sensoren und robusteren Designs ist. Für die Auswahl reicht der Maximalwert aber nicht aus, denn in der Praxis bestimmen mehrere Kennwerte gemeinsam die Qualität. Bei hochwertigen Bausteinen können die Rauschwerte teils unter 0,01 °/s/√Hz liegen, doch entscheidend ist immer, wie sich der Sensor im eigenen Aufbau verhält.
| Kennwert | Was er praktisch bedeutet | Worauf ich achte |
|---|---|---|
| Messbereich | Wie schnell sich der Sensor noch sauber verhält | Zu kleiner Bereich clippt schnelle Bewegungen, zu großer Bereich verschenkt oft nutzbare Empfindlichkeit |
| Rauschdichte / ARW | Wie stark das Ausgangssignal um den Nullpunkt zittert | Für Stabilisierung und Navigation oft wichtiger als der reine Maximalbereich |
| Bias / Nullrate | Der Ausgangswert bei Stillstand | Immer als Offset behandeln und bei Bedarf kalibrieren |
| Bias-Stabilität | Wie konstant der Nullpunkt über Zeit und Temperatur bleibt | Für Langzeitverhalten meist wichtiger als die reine Auflösung |
| Bandbreite | Welche Bewegungsfrequenzen noch abgebildet werden | Zu schmal macht träge, zu breit zieht mehr Rauschen ins System |
| Temperaturbereich | Wie robust der Sensor unter Umweltstress bleibt | Besonders wichtig für Industrie, Automotive und Außengeräte |
| Schnittstelle | Wie der Sensor im System angebunden wird | SPI, I²C oder analog beeinflussen Latenz, Layout und Firmware-Aufwand |
Ich achte dabei besonders auf den Zusammenhang zwischen Messbereich und Bandbreite: Ein zu kleiner Bereich clippt schnelle Bewegungen, ein zu großer Bereich verschlechtert oft die nutzbare Auflösung. Wer diese Werte richtig liest, versteht auch schneller, warum der Vergleich mit anderen Sensorsystemen so wichtig ist. Für präzisere Anwendungen lohnt sich zusätzlich ein Blick auf die Allan-Varianz, weil sie zeigt, wie sich Rauschen und Bias über verschiedene Mittelungszeiten verhalten.
Gyroskop, Beschleunigungssensor und IMU im Vergleich
In vielen Projekten wird das Gyroskop zu schnell isoliert betrachtet. In Wahrheit ist es meist nur ein Teil der Lösung, weil sich mit Beschleunigungssensor und Magnetometer ganz andere Größen messen lassen. Die sauberste Entscheidung fällt, wenn man die Rollen der Sensoren nebeneinanderlegt.
| Sensor | Misst | Stärke | Grenze |
|---|---|---|---|
| Gyroskop | Drehrate um eine Achse | Schnelle Rotationsänderungen, gute Regelung, niedrige Latenz | Drift über Zeit, keine absolute Lage |
| Beschleunigungssensor | Lineare Beschleunigung und Schwerkraftvektor | Neigung, Bewegungserkennung, Referenz zur Gravitation | Unterscheidet Bewegung und Gravitation nicht immer sauber |
| Magnetometer | Magnetfeldrichtung | Heading-Referenz, Kompassfunktion | Störanfällig durch Metall, Ströme und Magnetfelder |
| IMU | Kombination aus mehreren Sensoren | Sensorfusion für robustere Orientierung | Nur so gut wie Kalibrierung, Filter und Mechanik |
Die Tabelle erklärt auch, warum Sensorfusion so verbreitet ist: Ein Gyroskop ist schnell und dynamisch, ein Beschleunigungssensor liefert die Referenz zur Schwerkraft, und ein Magnetometer kann die Ausrichtung zum Erdmagnetfeld ergänzen. Wer die drei Bausteine kombiniert, bekommt ein stabileres Lagebild als mit einem einzelnen Sensor. Aus dieser Logik ergeben sich direkt die wichtigsten Einsatzfelder.
Wo diese Sensoren in der Elektronik den größten Nutzen bringen
Ich sehe MEMS-Gyroskope überall dort im Vorteil, wo Bewegungen klein, schnell oder schwer mechanisch abzufangen sind. Besonders relevant werden sie, sobald ein Gerät nicht nur messen, sondern auch stabilisieren oder aktiv nachregeln soll.
- Smartphones und Kameras - Hier sorgen Gyroskope für Bildstabilisierung, Drehungserkennung und flüssige Benutzerinteraktion. Der Nutzen ist unmittelbar sichtbar, weil Verwacklungen und Rotationen direkt kompensiert werden.
- Drohnen und Robotik - In Flug- und Fahrreglern liefern sie die Drehrate für schnelle Korrekturen. Ohne sauberes Gyro-Signal wird die Regelung nervös oder träge.
- Wearables und AR/VR - Für Kopf- und Handbewegungen zählt eine niedrige Latenz. Kleine Verzögerungen wirken hier sofort störend.
- Industrie und Fahrzeugtechnik - Yaw-Rate, Vibrationsanalyse und Stabilisierung sind typische Aufgaben. In solchen Umgebungen entscheidet die Robustheit gegen Schock und Temperatur stärker als der reine Preis.
- Vernetzte Feldgeräte und Kameraplattformen - Gerade in Infrastruktursystemen ist wichtig, dass die Messung auch bei Montageabweichungen, Vibrationen und wechselnden Umgebungsbedingungen stabil bleibt.
Wenn ich eine Anwendung bewerte, frage ich deshalb nicht zuerst nach dem Sensortyp, sondern nach der Dynamik des Systems: Wie schnell dreht es, wie stark vibriert es, und welche Genauigkeit wird wirklich gebraucht? Genau daraus ergibt sich dann der passende Integrationsweg.
So wähle und integriere ich den passenden Sensor
Die meisten Fehlkäufe entstehen nicht wegen schlechter Hardware, sondern weil Sensor und Anwendung nicht sauber zueinander passen. Ich gehe deshalb immer in derselben Reihenfolge vor.
- Messbereich zuerst festlegen - Die erwartete maximale Drehrate bestimmt, ob ein kleiner, empfindlicher Bereich reicht oder ob mehr Reserven nötig sind.
- Bandbreite an den Regelkreis anpassen - Zu wenig Bandbreite macht die Regelung träge, zu viel Bandbreite zieht unnötig Rauschen ins System.
- Bias und Temperaturdrift einplanen - Der Nullpunkt ist nicht konstant. Ich plane Kalibrierung und Temperaturkompensation immer mit ein.
- Mechanische Einbausituation prüfen - Leiterplattenbiegung, Vibrationen und Montagefehler können das Ergebnis stärker verschlechtern als eine mittelmäßige Sensitivität.
- Stand-alone oder IMU entscheiden - Für reine Drehratenmessung reicht ein einzelnes Gyroskop oft aus. Für stabile Orientierung ist eine IMU meist die bessere Basis.
Bei der Schnittstelle sind SPI und I²C die typischen Wege; analog ist seltener geworden, wenn Latenz und Störfestigkeit wichtig sind. Ein guter Integrationsplan beginnt also nicht mit der Stückliste, sondern mit den Bewegungsdaten des Systems, denn genau dort entscheidet sich, ob das spätere Signal im Alltag brauchbar bleibt.
Typische Fehler bei Integration und Auswertung
Im Debugging sehe ich immer wieder dieselben Muster. Sie sind banal, aber teuer, weil sie Zeit in Firmware, Mechanik und Testaufbau verbrennen.
- Drehwinkel statt Drehrate erwarten - Das Gyroskop liefert eine Geschwindigkeit, keinen fertigen Winkel. Wer das Signal nur integriert, bekommt bei Drift schnell falsche Ergebnisse.
- Temperaturverhalten ignorieren - Ein Offset, der am Labortisch klein wirkt, kann im Feld deutlich wandern. Ohne Kompensation verschiebt sich das Lagebild.
- Zu früh filtern oder zu spät filtern - Zu aggressive Filter machen das System träge, zu offene Filter lassen Störungen durch. Die richtige Grenzfrequenz hängt vom Einsatzfall ab.
- Falsche Achsenausrichtung in der Software - Schon eine vertauschte Achse kann ein stabiles System in einen schwer erklärbaren Fehlerzustand bringen.
- Langfristige Orientierung nur aus dem Gyro ableiten - Ohne Referenzsensor summieren sich kleine Fehler. Für robuste Orientierung braucht es fast immer zusätzliche Information.
Wenn ein System unruhig wirkt, liegt die Ursache deshalb oft nicht im Sensor selbst, sondern in der Art, wie das Signal gemessen, gefiltert und interpretiert wird. Daraus folgt die letzte Frage: Welche Prioritäten setzen erfahrene Entwickler heute zuerst?
Worauf ich 2026 bei einem guten Gyro-Design zuerst achte
Ich beginne nicht mit der höchsten Auflösung auf dem Papier, sondern mit dem stabilsten Verhalten im realen Gerät. Drift, Vibrationsfestigkeit, Temperaturstabilität und saubere Kalibrierung entscheiden in vielen Projekten stärker über die Qualität als ein besonders großer Zahlenwert im Datenblatt.
- Signalqualität vor Marketingwerten - Niedriges Rauschen und ein kontrollierter Nullpunkt bringen mehr als ein beeindruckender Maximalbereich, den das System nie braucht.
- Mechanik vor Software - Eine gute Firmware kann viel kompensieren, aber keine schlechte Montage vollständig heilen.
- Messkette vor Einzelbaustein - Sensor, Layout, Versorgung, Filter und Fusion müssen als ein System gedacht werden.
- Validierung unter echten Bedingungen - Schock, Vibration, Temperaturwechsel und Dauerbetrieb zeigen erst, ob das Design im Feld hält.
Wer ein MEMS-Gyroskop so betrachtet, trifft meist die besseren Entscheidungen: nicht den Sensor isoliert bewerten, sondern seine Rolle im gesamten System. Genau dort entsteht am Ende die Qualität, die ein Produkt in der Praxis zuverlässig macht.