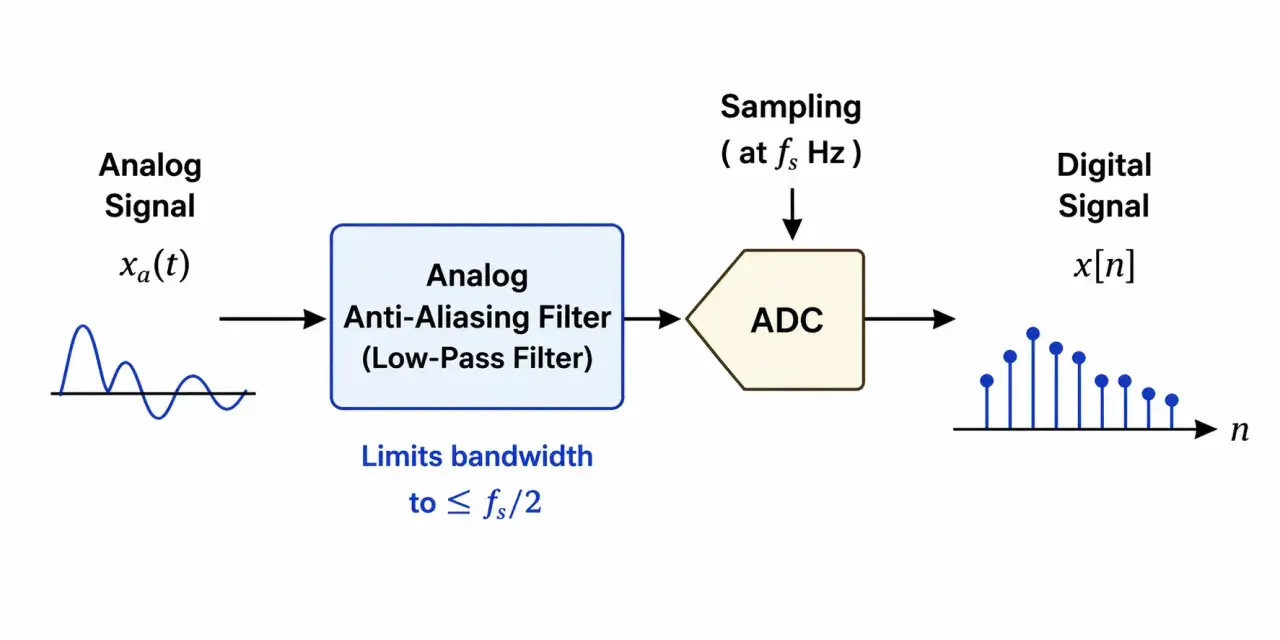
Ein anti-aliasing filter ist die unsichtbare Schutzschicht vor dem ADC: Er begrenzt die Bandbreite eines analogen Signals so, dass Frequenzen oberhalb der halben Abtastrate nicht als falsche Tieffrequenzen im Digitalsignal auftauchen. Genau deshalb entscheidet diese Stufe in Messgeräten, Audiopfaden, Sensor-Gateways und Funktechnik oft darüber, ob ein System sauber misst oder nur scheinbar saubere Daten liefert. Im Folgenden zeige ich, wie das Prinzip funktioniert, wie man die Grenzfrequenz sinnvoll festlegt und welche Fehler in der Praxis am häufigsten Zeit kosten.
Die kurze Antwort auf einen Blick
- Aliasing entsteht, wenn Frequenzen oberhalb von fs/2 bei der Abtastung in den Nutzbereich gefaltet werden.
- Der Anti-Aliasing-Filter ist in der Praxis meist ein analoger Tiefpass vor dem ADC.
- Die Grenzfrequenz gehört nicht exakt auf Nyquist, sondern mit Reserve darunter.
- Ein einfaches RC-Glied reicht nur bei groben Anforderungen; präzise Systeme brauchen oft aktive Mehrpolfilter.
- Mehr Abtastrate entspannt das Design, ersetzt den analogen Vorfilter aber selten vollständig.
Warum Aliasing überhaupt entsteht
Beim Abtasten wird ein kontinuierliches Signal in einzelne Messpunkte zerlegt. Alles, was oberhalb der Nyquist-Frequenz liegt, kann der Wandler nicht mehr eindeutig unterscheiden und wird im Spektrum nach unten gespiegelt. Genau darin liegt das Problem: Das digitale Ergebnis sieht formal sauber aus, enthält aber falsche Information.
Ein einfaches Zahlenbeispiel macht das greifbar. Bei 100 kS/s liegt die Nyquist-Frequenz bei 50 kHz. Ein Störer bei 62 kHz taucht nach der Abtastung nicht als 62 kHz auf, sondern kann als 38 kHz erscheinen. Für die Auswertung ist das besonders heikel, weil der Fehler nicht wie Rauschen wirkt, sondern wie ein echter Signalanteil.
Darum reicht es nicht, nur die Nutzfrequenz zu kennen. Ich muss immer auch fragen: Welche höheren Frequenzen gibt es im System, wo liegen sie, und wie viel Reserve habe ich zwischen Nutzband und Nyquist? Sobald das klar ist, geht es an die Schaltung davor.
Wie ein Anti-Aliasing-Filter aufgebaut ist
In einer realen Signalkette sitzt vor dem ADC fast immer ein analoger Tiefpass, oft ergänzt durch einen Pufferverstärker. Der Puffer entkoppelt Quelle und Wandler, denn der Eingangs-Sample-and-Hold des ADC verhält sich nicht wie eine perfekte Last. Ohne diese Entkopplung verschiebt sich die reale Frequenzantwort schneller, als viele Layouts vermuten lassen.
Für einfache Anwendungen genügt manchmal ein einzelnes RC-Glied. Sobald die Dämpfung steiler werden muss, ziehe ich aber ein aktives Filter vor. Das ist robuster, kontrollierbarer und lässt sich sauberer auf die gewünschte Flanke trimmen.
| Filtertyp | Stärke | Schwäche | Typischer Einsatz |
|---|---|---|---|
| RC-Glied | Sehr einfach, günstig, wenig Bauteile | Nur sanfte Dämpfung pro Dekade | Grobe Sensorik, niedrige Anforderungen |
| Butterworth-Filter | Flacher Durchlassbereich, guter Kompromiss | Mehr Bauteile als ein RC-Glied | Messketten, Telemetrie, allgemeine Signalverarbeitung |
| Chebyshev-Filter | Steilere Flanke bei gleicher Ordnung | Ripple im Durchlassbereich | Wenn der Übergangsbereich knapp ist |
| Elliptischer Filter | Sehr steile Flanke | Am anspruchsvollsten in Abstimmung und Toleranzverhalten | Sehr enge Spezifikationen, knapper Platz für Reserve |
Was ich in der Praxis immer mitdenke: Phasenverlauf und Gruppenlaufzeit. Wenn mehrere Kanäle zeitlich verglichen werden, kann ein sauberer Amplitudengang allein trotzdem zu falschen Aussagen führen. Je höher die Filterordnung, desto genauer sollte man also nicht nur auf die Dämpfung, sondern auch auf das Verhalten im Zeitbereich schauen.
Die eigentliche Frage ist deshalb nicht nur, welcher Filtertyp technisch möglich ist, sondern welcher zur Samplingrate, zur Dynamik und zur Störumgebung passt. Genau dort beginnt die Dimensionierung.
So setze ich Grenzfrequenz und Ordnung sinnvoll
Ich gehe dabei immer in derselben Reihenfolge vor. Erst bestimme ich das echte Nutzband. Dann prüfe ich die Abtastrate. Erst danach entscheide ich, wie viel Übergangsbereich und Dämpfung ich brauche.
- Nutzband festlegen: Welche Frequenzen müssen ohne relevante Dämpfung durch?
- Nyquist berechnen: Die halbe Abtastrate ist die Grenze, an der Aliasing beginnt.
- Guard-Band einplanen: Zwischen Nutzband und Nyquist muss Platz für die Filterflanke bleiben.
- Störer bewerten: Wie stark sind hohe Frequenzen, Schaltnetzteilreste, Träger oder Leitungsstörungen?
- Ordnung wählen: Je steiler die Flanke, desto höher meist der Aufwand und desto genauer die Abstimmung.
| Stellgröße | Worauf ich schaue | Warum das zählt |
|---|---|---|
| Nutzband | Bis zu welcher Frequenz das Signal wirklich korrekt bleiben muss | Setzt die untere Grenze für die Grenzfrequenz |
| Abtastrate | Wo die Nyquist-Frequenz liegt | Bestimmt die Breite der Übergangszone |
| Störspektrum | Welche hohen Frequenzen im System vorhanden sind | Bestimmt die nötige Dämpfung im Sperrbereich |
| Filterordnung | Wie steil die Flanke sein muss | Entscheidet über Bauteilaufwand und Empfindlichkeit |
Ein praxisnahes Bild: Bei einem 1-kHz-Messsignal und 100 kS/s liegt Nyquist bei 50 kHz. Ein 10-kHz-Tiefpass hat dort deutlich mehr Luft als ein Design, das schon knapp oberhalb 1 kHz abfällt. In einem Beispiel von Texas Instruments lag die Dämpfung am Nyquist-Punkt sogar bei rund 50 dB. Genau solche Reserven machen den Unterschied zwischen einem fragilen und einem belastbaren Entwurf.
Wenn die Samplingrate noch frei wählbar ist, ist mehr Rate oft die eleganteste Entschärfung. Sie verschiebt die Nyquist-Grenze nach oben und macht die Filterflanke weniger kritisch. Ich nutze diesen Hebel gern, weil er oft weniger Aufwand verursacht als ein extrem steiles Analogfilter.
Sobald diese Stellgrößen passen, kommen die Fehlerquellen ins Spiel, die in der Praxis am meisten Zeit kosten.
Typische Fehler, die ich in Entwürfen immer wieder sehe
- Die Grenzfrequenz sitzt zu nah an Nyquist. Dann bleibt kaum Platz für den Übergangsbereich, und kleine Toleranzen reichen aus, um Aliasing doch noch zuzulassen.
- Nur das Nutzsignal wird betrachtet. Harmonics, Schaltspitzen und breitbandiges Rauschen sind oft der eigentliche Auslöser für Fehlmessungen.
- Der ADC wird ohne Puffer direkt an ein RC-Glied gehängt. Das verändert die reale Last und damit auch die berechnete Filterkurve.
- Auf einen digitalen Filter wird zu früh vertraut. Was bereits gefaltet wurde, kann nach dem ADC nicht mehr sauber zurückgeholt werden.
- Phasenverhalten wird ignoriert. In mehrkanaligen Messsystemen kann das zu falschen Zeitbezügen und irreführenden Vergleichen führen.
Ich prüfe deshalb nicht nur den Amplitudengang, sondern auch Bauteiltoleranzen, Op-Amp-Bandbreite und Stabilität. Ein schöner Simulationsverlauf nützt wenig, wenn die reale Schaltung bei Temperatur, Last oder Layout leicht aus dem Tritt gerät.
Gerade in Telekommunikations- und Infrastrukturumgebungen wird das schnell sichtbar, weil dort Leitungen lang, Störer vielfältig und Wartungsfenster knapp sind. Genau dort entscheidet ein sauberer analoger Vorfilter oft darüber, ob ein Messwert vertrauenswürdig ist oder ob man später unnötig vor Ort nach Fehlern sucht.
Warum das in Telekommunikation und Infrastruktur so wichtig ist
In einem Funkempfänger, einem Telemetrie-Gateway oder einem Messknoten an einer Netzstation geht es selten nur um “saubere Theorie”. Dort treffen Schaltnetzteilreste, HF-Einstreuungen, Taktspitzen und lange Leitungen aufeinander. Ohne geeignete Bandbegrenzung kann der ADC daraus Frequenzanteile machen, die im Digitalen wie echte Signale aussehen.
Ich sehe besonders drei typische Szenarien:
- Funkmessung: Ein Störer oberhalb der Nyquist-Frequenz wird in den Messbereich gespiegelt und verfälscht die Spektralanalyse.
- Infrastrukturmonitoring: Sensoren an Energie-, Wasser- oder Netztechnik liefern breitbandige Störungen mit, die erst analog gedämpft werden müssen.
- Edge-Geräte in abgelegenen Netzen: Wenn Wartung teuer ist, muss der Front-End-Entwurf beim ersten Mal robust sitzen.
Für solche Systeme ist der Anti-Aliasing-Filter kein akademisches Detail, sondern ein Schutz gegen Fehlinterpretation. Gerade bei Projekten mit knappen Ressourcen oder schwieriger Logistik zahlt sich eine saubere analoge Eingangsstufe später mehrfach aus, weil sie Fehlersuche, Nacharbeit und unnötige Alarme reduziert.
Genau deshalb lohnt sich am Ende ein kurzer, harter Prüfplan statt bloßer Annahmen.
Die drei Prüfwerte, die ich vor dem ersten Prototypen festlege
Bevor ich das Layout finalisiere, beantworte ich mir immer drei Fragen: Wie breit ist das Nutzband wirklich? Welche Störungen liegen oberhalb von Nyquist? Wie viel Reserve brauche ich bei Flachheit, Phase und Dämpfung? Erst wenn diese Punkte sauber sind, wähle ich den Filtertyp und die Ordnung.
- Wenn das Nutzband klein und die Abtastrate hoch ist, reicht oft ein moderater Analogtiefpass.
- Wenn die Übergangszone eng ist, brauche ich mehr Ordnung oder mehr Samplingrate.
- Wenn Timing und Kanalgleichheit wichtig sind, prüfe ich den Phasengang genauso streng wie die Dämpfung.
So wird aus einer abstrakten Regel ein belastbares Front-End-Design: erst das Spektrum verstehen, dann die Bandbreite begrenzen, dann den ADC einsetzen. Genau diese Reihenfolge hält Messwerte, Sensorströme und Funksignale in der Praxis zuverlässig im Griff.